Краткий гайд по квадрокоптерам для FPV. Часть четвёртая - поговорим о мозгах?
Если Вы наткнулись на этот пост в ленте и не читали предыдущие - вот они:
Первая часть, в которой я рассказал о том, что такое FPV-полёты и что для них нужно, а так же посоветовал пару коптеров для новичков.
Вторая часть - про аккумуляторы и аппаратуру радиоуправления.
Третья часть - про движки и регуляторы.
К несчастью, из-за повышенного режима безопасности в связи с праздниками полетать и заснять материал мне не удалось. Так что сегодня - предпоследняя часть про теорию.
Ну а для начала - небольшой экскурс в историю. Давным-давно, когда деревья были выше, а трава зеленее, на территории ныне почившей страны росли и развивались кружки авиамоделизма. И в этих самых кружках дети, которые сейчас уже взрослые дяденьки, строили кордовые модели. Модели эти были жёстко соединены с пилотом при помощи тросов и ручки, изменяя положение которой пилот, собственно, и отклонял рули. Прошли года, на рынках появилась доступная аппаратура радиоуправления, и вместо стальных тросиков рули на модели стали отклоняться при помощи радиоволн и сервомашинок. Но принцип - принцип оставался тот же. Движением стика на пульте или ручки управления пилот напрямую отклоняет рули или изменяет обороты двигателя. Думаете, на квадрокоптерах применяется тот же самый принцип? А вот и нет. И в этом основное их преимущество.
Полётом дрона управляет полётный контроллер - по сути своей полноценный микрокомпьютер. Именно он, а не Вы, управляет креном, тангажом и рысканьем модели. Вы лишь указываете, в каком направлении лететь или, в режиме Акро (о нём расскажу чуть дальше), с какой угловой скоростью вращаться. Поэтому огромное количество дешёвых китайских дронов-игрушек и снискали такую популярность - управлять ими, по сравнению с моделями тех же самолётов, не в пример проще.
По итогу, вся жизненно важная начинка дрона состоит из полётного контроллера - мозга дрона, платы распределения питания, а так же подсоединённых к ним четырёх (6, 8) регуляторов с моторами и приёмника аппаратуры радиоуправления. Вот так всё это выглядит в сборе:
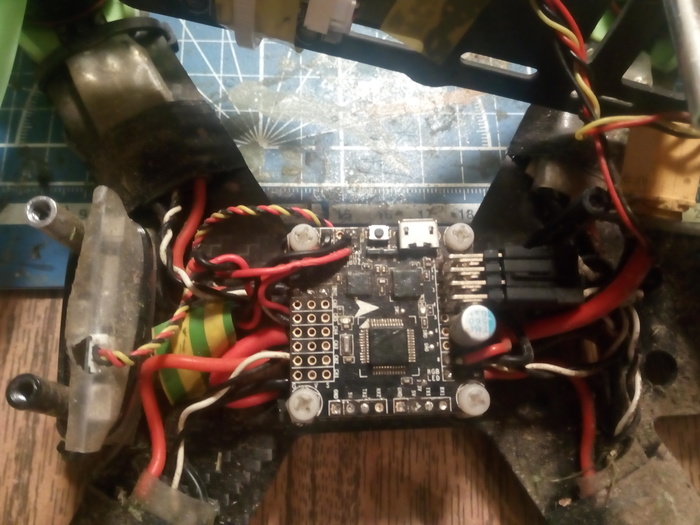
В центре, с белой стрелкой - полётный контроллер. Под ним расположена плата распределения питания (PDB). На фото к ней идут самые толстые красный и чёрный провода от жёлтого разъёма справа. У задних вертикальных стоек слева стоит приёмник. Чёрно-белые провода с чёрных разъёмов справа и красно-чёрные средние провода идут к регуляторам.
Внутренности игрушки же выглядят немного по другому:

Тут всё в одном - и полётник, и приёмник, и pdb, и регули... Осталось подключить батарейку с моторами и лететь.
Но главная разница между серьёзным дроном и игрушкой всё же не в этом. На довольно большом количестве мелких дронов всё собрано на одной платке:

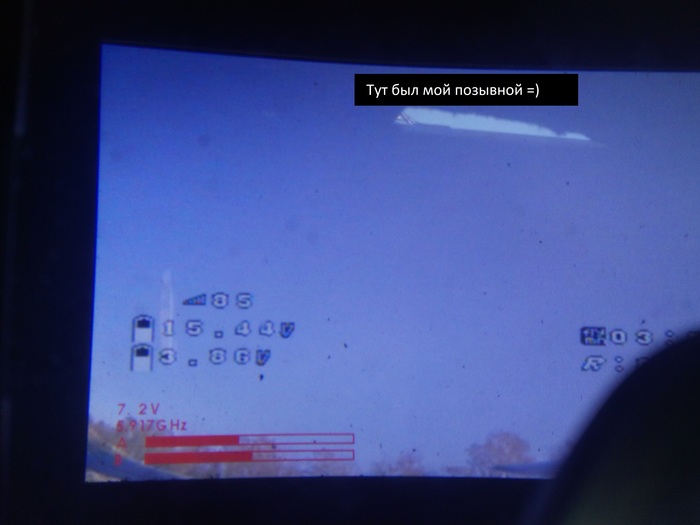
А главная разница - в прошивке. И как раз о ней мы сейчас и поговорим. Вот так выглядит интерфейс серьёзного, "не игрушечного" полётника, подключённого к компу:

Да, люблю я Пелевина =)
А игрушечный дрон так просто не подключишь и не перепрошьёшь.
Но зачем всё это надо? Прошивки-перепрошивки, подключения... Летает - и чего ему мешать?
Во-первых, удобство. В бетафлайтовском интерфейсе полётник (и соответственно дрон) каждый пилот может настроить под себя. Начиная с того, на каком переключателе аппаратуры будет арминг (то есть включение движков дрона, на каком - пищалка для поиска упавшей модели (надо ли говорить, что на игрушечном пищалка вообще не предусмотрена) и кончая настройкой поведения самого дрона в полёте - будет ли он прощать новичкам ошибки или же действовать стиками придётся с ювелирной точностью. Настройка дрона, рейты и ПИДы это отдельная и ОЧЕНЬ серьёзная тема, и не факт, что у меня хватит скилла про всё это рассказать.
А во вторых, режим АКРО. Вспомните, как летает игрушка. Отклонил стик вперёд - и коптер летит вперёд с определённым углом наклона. Отпустил - сразу возвращается в положение, параллельное горизонту. Стик вправо - коптер летит таким же макаром, но вправо. Но сколько ты его вправо не отклоняй - бочку коптер не сделает. Такой режим, когда коптер двигается, как клешня в игровом автомате-хватайке и автоматически возвращается в горизонт при отпускании стика называется режимом автоматической стабилизации (стабом).
В стабе Вы управляете направлением движения дрона.
А что же АКРО? Акро - это гоночный режим. Это фристайловый режим. И там Вы управляете не направлением движения, а вращением дрона. Поэтому, как только Вы освоились с основными принципами управления дроном - учитесь летать в акро. Только этот режим раскроет полный потенциал вашего дрона и позволит летать уже по-настоящему. А вот крохотной игрушечной платке на этот режим просто не хватит "мозгов".
Теперь - о том, какой-же полётник всё-таки брать. Для гоночных бодрых полётов я советую полётники на f4 - третьей серии процессора. У меня на основном сетапе стоит airbot f4 - доволен более чем.
Наглядную разницу между стабом и акро я покажу, как выберусь в поле. А пока по традиции - ответы на все вопросы в комментах.
P.S. Я специально упростил некоторые вещи - у нас гайд всё-таки для новичков.