0 просмотренных постов скрыто


Полеты на Арракисе
Идея скрестить Дюну и "Полет Валькирий" просто лежала на поверхности :)

Разные космические объекты требуют разный подход к выходу на орбиту
Статью задумал давно, но наступил май, сезон строительства с командировками. И, когда посыпались научные работы о волнолетах, далее махолеты, вибролеты, лифты, Hyperloop, в то числе медная труба, стреляющая килограммовыми снарядами, я понял, время выкладывать свой шедевр. Учитывая контингент, подписанный на сайте, которому на пальцах объяснять не надо, мне все равно не избежать ошибок, строительное прошлое-пошлое надежно наложило свой отпечаток.
Что мы можем построить в настоящее время для вывода кораблей на орбиту, основываясь на современные материалы и научные изыскания?
Космический лифт. Это избившая тема частенько напоминает о себе, но все попытки упираются в прочность троса. Все ждут панацею, появления длинных нитей из углеродных нанотрубок, из которых можно свить канат. Что на сегодня? Начнем с дешевого: в интернете взял доступный полиамидный канат, то есть его аналог 48мм -1420грамм/м – 28250кГс. Свой вес он выдержит длинной в 20 километров в земных условиях. Слишком мало. Забросим на Луну, гравитация уменьшит его вес в шесть раз, как итог получим 120км. Очень дешево не получается)))
Отправимся на поиски кевлара и карбона, данные у них схожи. Прочность 600кг/мм, вес 1.4 г/см3, длина каната, выдерживающая свой вес, составит 428км. Не густо.
В завершении нашел кричащее заявление: Зайлон®, самая прочная в мире нить. Зайлон получают, примешивая полимер под названием ПБО (парафенилен-бензобисоксазол) при принудительном пропускании через прядильную машину. Прочность на растяжение у зайлона примерно в 10 раз больше, чем у стали — зайлоновая нить толщиной всего лишь в 1 мм может выдержать предмет весом в 450 кг! В 2001 году НАСА использовала его как упрочняющий материал для космического наблюдательного зонда.
Снимок, сделанный во время демонстрационных испытаний, которые проводила НАСА. Ткань шара-зонда содержит зайлон®.
Про вес этого материала ничего не нашел, зайлон созвучно как нейлон, плотность которого 1г/см3, тогда супер нить выдержит свой вес — те же 450км, но если плотность окажется выше, то и рассматривать нет смысла. В общем, лифт для Земли в качестве удешевления вывода на орбиту грузов с Земли, в обозримом будущим не появится, троса потребуется более 315000 км, чтоб перевалить за точку Лагранжа. Хватит ли прочности у нановолокон? Альтернативы двигателям на химии нет.
Перейдем к Луне, подставляя данные прочности нитей получим 2700км длинны. При удалении от нее гравитация уменьшится, но все равно на порядок не дотянем до точки Лагранжа.
А нужен ли он вообще? Во-первых, теряем время: орбитальное взаимодействие корабля и лифта, стыковка, гашение колебаний троса, затем медленное движение лифта по тросу за тысячи километров (груз можно запускать, он «кушать» не просит). Во-вторых, на пути будут встречаться соединительные узлы, перед которыми, вероятно, придется тормозить.
Механическое сцепление лифта с тросом для передвижения породит его износ или ремонт его покрытия. Если взять концепт каркасной архитектуры с десятком тросов по кругу и добавить магнитный движитель для ускорения, то цена будет, гм, назвать космической, ничего не сказать. С космонавтами в любом случаи придется подлетать по ближе к Луне, то есть на орбиту.
Был комментарий о трудностях причаливания к лифту, проверим. Точка Лагранжа L1 находится от Луны на расстоянии 65 000 км и перемещается со скоростью 0.8км/сек и соответственно Луна 1.024км/сек. Противовес, вынесенный за точку L1 ближе к Земле еще медленнее. По всей длине троса мы имеем разницу приблизительно 0.4 км/сек. Приемная станция, передвигающаяся по тросу, может принять груз в любой точке, согласно скорости корабля. Вроде есть границы для маневра, к тому же выводимые корабли с большим апогеем, сократят расходы топлива. Лифт на Луне это все же утопия, даже углеродные трубки, из которых научатся вить веревки через сотню лет не будут панацеей, к этому времени заработают ядерные и другие схожие двигатели.
Hyperloop.
Для Земли потребуется труба, уходящая в стратосферу, это снова из области фантастики. Был бы Эверест высотой с марсианский Олимп, то уложить ее по склону можно было бы попробовать, завершив Бурш-Халифом. Вот на Луне есть свой природный вакуум, убираем трубу, останется скоростной поезд на магнитной подушке. Приступаем к строительству, доставляем различную строительную технику, передвигаем, укатываем кубометры лунного грунта в идеальный горизонт, далее собираем «весомую» рельсовую дорогу. На нее устанавливается левитирующая тележка, она имеет вес, значит, лучше оставить на рельсах, но тогда потребуется ее торможение. И, как следствие, снова продолжаем ровняем Луну и удлиняем рельсы. Получается не дешево и это все для выхода на орбиту, а как принять груз с нее? Разгоняем телегу до необходимой скорости и синхронизируем с капсулой, летящей с орбиты. Атмосферы нет, планировать не получится, капсуле потребуются маневровые двигатели, а это дополнительный вес и километры рельсового пути, на короткой дороге все это не сделаешь, аттракцион не для слабонервных!
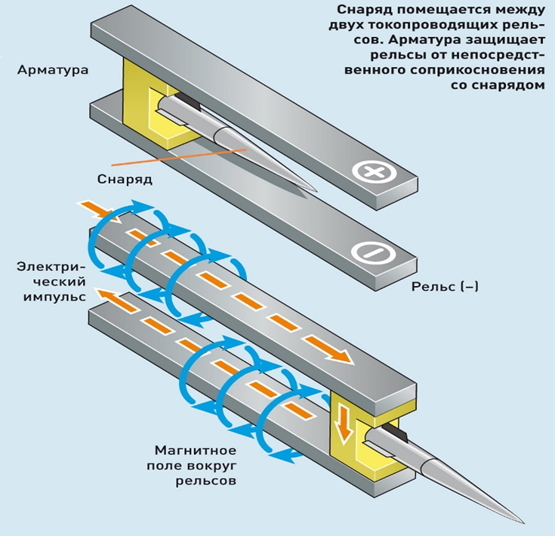
Рельсотрон.
Действующий образец
Принцип действия
Здесь дела обстоят по проще: электромагнитная пушка, не пороховая, она способна создать в нужный момент точный импульс, который придаст необходимую скорость выводимой капсуле, в точности с орбитальной скоростью станции, что уменьшит работы «маневровому» кораблю по их сбору. В настоящее время военными испытываются пушки с дульной энергией в 64 МДж, которой хватает для разгона снаряда в 20 кг до 2500 м/с.
Учитывая в шесть раз меньшую гравитацию Луны, и почти вдвое меньшую необходимой скорости (первая космическая 1,678км/сек) мы получим снаряд в 200 кг, это уже солидно. Но опять же, это только для грузов и в одном направлении, а грузы на Луне в начале заселения придется больше принимать чем отправлять. С перегрузкой рельсотрона в 40-60g справится только тихоходка, пассажиры продолжат использовать корабли.
И все же на данный момент вариант рабочий, дешевый, для транспортировки грузов.
Главный недостаток – это работа в одном направлении. Как решение: пушка забрасывает капсулы на орбиту, следом с поверхности взлетает пустой корабль или с экипажем, и подбирает груз, превосходящий его стартовой массе с поверхности. Экономия топлива будет солидной, не говоря о том, что, если уменьшить массу капсулы и добавить импульса, можно отправлять грузы прямиком на орбиту Земли.
Пушка Гаусса.
Пушка Гаусса для этих целей подходит лучше, точнее установка со схожем с ее действием.
Однажды читал о разработке поезда, проходящего или пролетающего в кольцевых магнитах, установленных на расстоянии в несколько метров на отдельных опорах. Старшип имеет диаметр 9м и в него могут войти 7-8-ми метровые кольца, через них пройдет очень солидная транспортная капсула. На пересеченной местности их установка не займет много труда, достаточно буровой установки. Забурили, вставили кольцо на телескопической ножке, выравниваем по высоте, к ним подключаем по солнечной батарее и накопительному конденсатору. Капсула, сведенная с орбиты проходя кольца затормаживается. Далее, готовим капсулу к запуску, устанавливая в начале пути, чтоб направление полета совпадало с движением орбитальной станции.
Для космонавтов чтоб выдержать максимальную перегрузку в 7g необходимо около 20-ти км пути, разгон составит 24сек. Точнее расчеты произвести не могу, не хватает образования, но если ставить их через 50-100 метров, то необходимо 200-400 штук. Много? Я бы сказал не очень, поменьше будет, чем рельсы или трос для лифта. Равнять поверхность не надо, и по массе будут значительно меньше. Еще можно для первичного ускорения, так и для торможения, использовать катапульту. Самый трудный этап — это попадание в кольцо с орбиты, но это легче, чем килограммовыми снарядами в двадцатисантиметровые трубы еще на разных орбитах (был такой комент). Вероятно, самые первые (приёмные) электромагнитные кольца должны быть собраны побольше диаметром, для центрировки капсулы. Кольца толщиной с полметра, Старшип заберет с полсотни, а в центр вложить ножки, это составит примерно 40 полетов.
Луне подобрали стартовое устройство, перейдем к Марсу.
Если на Земле лифт это пока фантастика, а Луне он не нужен, то для Марса в самый раз. Да-да, первый лифт строить будем на Марсе. Гравитация ниже в 2.5 раза, и имеются природные противовесы Фобос и Деймос. В аналогии с Луной они ближе к своей планете, значит и трос должен быть короче всего-то на сотню тысяч километров.
Начнем с Деймоса, так как он для этой роли не подходит. Наклонение орбиты почти совпадает с орбитой Фобоса, значит трос будет часто в опасности налететь на компаньона, учитывая их быстрое вращение, замучаешься его отклонять. Жаль, у него ниже скорость в 1.23 разам по отношению к поверхности, то есть скорость троса у поверхности планеты равна 703км/час, который будет отставать от вращения Марса, то есть двигаться в противоположном направлении. Ну и бог с ним, на него троса понадобится на 14000 км больше. Хотя кандидатуру его не снимаем.
Фобос. Он находится ниже на орбите, всего в 6006 км от поверхности планеты. Главный недостаток — это скорость его вращения, трос, спущенный с него, будет передвигаться над поверхностью с 2785км/ч. Многовато. Да, мы забыли отнять скорость вращения самого Марса в попутном направлении, ведь в данном случаи он будет спешить за тросом, а это 868км/ч, итого скорость движения троса над поверхностью планеты равна 1917км/час. Уже не так страшно и сопоставимо со скоростью полета той же капсулы из пушки Гаусса. Это в два раза больше скорости звука на Марсе (244м/сек = 876 км/ч). На Земле 331 м/сек = 1192 км/ч, с ее плотностью, истребители превышают 3.2 Маха, это 3814 км/ч.
В отличии от Луны здесь нам поможет разреженная атмосфера, ее плотности достаточно, чтоб закрепленный на тросе планер-крюк мог делать корректирующие маневры. Еще из достоинств, добавим сюда разницу перицентра и апоцентра равную в 283км, что поможет уходить от планеты и выдергивать груз из атмосферы.
Капсула вылетает из колец синхронизировано с тросом с небольшим превышение по скорости и цепляется за планер, как истребитель к дозаправщику. Небольшая разница в скорости не сможет серьезно раскрутить связку, разреженная атмосфера поможет избежать серьезных последствий, тем более последующий подъем в движении к перицентру, избавит от ее остатков (так ли?). Разницу перицентра и апоцентра разделим на полуоборот Фобоса по орбите, получим скорость удаления от поверхности 1.2км/мин.
Скорость эта не линейна, а по параболе, тогда не будем на нее надеяться, добавим промежуточную станцию, закрепленную примерно на 20-30км выше от планера, которая будет выбирать трос из атмосферы. Затем груз перегружается или цепляется за подвижную тележку и дальше на Фобос.
Масса спутника очень велика, так что лифт своими маневрами не притянет его к Марсу, кстати, Фобос медленно отдаляется от планеты, если в будущем и накопиться влияния, то это слегка притормозит его убегания. Ну и для самого пессимистичного прогноза, если он надумает сойти с орбиты и врежется в Марс, то этого удара хватит для разогрева всех льдов))) ( допустил ошибку, Фобос замедляется. Это снижение заметил Зелёный Готт 😊
Подставим данные по прочности кевларового троса, 450км умножим на уменьшенную гравитацию, получим где-то полторы тысячи км, плюс уменьшение массы с высотой, упрочнения смолами, (всех технологий мне не известно) до 2 000 км мы натянем налегке, останется еще 4 000 км. Тогда будем запускать капсулы с горы Олимп, еще уменьшим на 20км 😊. Но если без шуток. На Марсе плотность атмосферы равна плотности Земли на высоте 30км. Олимп вообще уберет воздействие атмосферы, вот только он не на экваторе и Фобос не пролетает над ним, но есть и другие высокогорные плато, которые позволят спустить на порядок ниже приёмную станцию.
Итог, лифт на Марсе может быть даже в ближайшем будущем, пока Илон шлифует свой Старшип для доставки, делаем расчеты и собираем материалы. Здесь он окажется более экономичный чем где-либо в Солнечной системе.


Показать полностью
4

Сказ о том, как махолетчики за старое взялись
Четыре года назад мы, инженеры, закаленные в боях с аэродинамикой и прочностью, показали всему миру наше детище – махолет «Рарок». Это было здорово - пришлось оправдываться, разъяснять, рассказывать и даже просить денег на «Boomstarter» дабы продолжить развитие нашего дела. Убив на это уйму времени и сил, мы все же решили не останавливаться на достигнутом, а продолжить развитие любимой темы. Эта статья о том, чего удалось добиться за прошедшие три с половиной года и чего мы хотим.

Итак, четыре года назад мы поняли, что остались без махолета, который делали для «дяди». По итогу, у нас было только видео полета аппарата и еще куча опыта. Подумав, поразмыслив, решили делать махолет заново. Так как ребята мы (Мельник Андрей и Дмитрий Шувалов) отчаянные и смелые, было принято решение собрать не один махолет, а сразу два. И ладно, если бы просто повторили прошлый успех – этого нам показалось мало, мы решили делать два новых аппарата с учетом тех проблем и ошибок, которые были допущены в ходе предыдущей разработки. Выбрали два направления развития махолета одно условно назвали «вдоль», другое – «поперек». Схема «вдоль» придерживалась следующей гипотезы: так как предыдущие опыты показали, что на крыльях творится что-то не ясное в плане аэродинамики, то можно попробовать сделать поликрылый махолет (4 пары крыльев, в определениях классической аэродинамики - 4 крыла) расположенных друг за другом. Такой подход решал сразу несколько проблем. Рост инерциальных нагрузок в третьей степени размаха крыла (смотри подробнее статью на Хабр) был уже не так страшен за счет того, что несущая площадь была увеличена количеством крыльев, аппарат можно было сделать относительно недорогим из-за использования простых решений и деталей небольшого размера. Помимо прочего, было решено сделать аппарат электрическим для простоты пусков и получения данных по энергетике процессов маха. Этот проект возглавил и понес весь груз проблем Дмитрий Шувалов. Название проекта - «Serenity».

Схема «поперек» придерживалась гипотезы: если обеспечить демпфирование нагрузок в конечных точках траектории маха, то можно добиться достаточной прочности, надежности и эффективности конструкции, чтобы перепрыгнуть теоретический барьер взлетной массы - 40 кг. Проект возглавил Мельник Андрей. Название проекта - «FlapFlyer». Этот проект был объемнее по составу деталей, сложности конструкции, размерам и взлетной массе. Финансово создать такой аппарат без привлечения других участников было невозможно. Фактически проект родился благодаря Алексею П. его инициативе и рвению ко всему новому.

Оба проекта были заложены практически одновременно летом 2017 г.
Уже в октябре 2017 года махолет «Serenity» прошел первые испытания (пробежки, статические прогоны). Следует отметить, что конструкция аппарата оказалась удачной. Она опиралась во многом на приобретенный нами опыт в проекте «Rarok», но была значительно усовершенствована и модернизирована. Дальнейшие испытания показали правильность и надежность выбранных конструкторских решений. Однако, несмотря на соблюдение, казалось бы, всех условий аппарат упорно не хотел летать, что и показали летные испытания. Мы подбирали центровку и баланс, меняли конструкцию крыльев с целью максимально их облегчить, механизм и длину балок оперения, систему управления и т.д. Каждое испытание давало нам зацепку, как решить проблему полета. И каждый раз мы упирались во что-то новое. Нужно понимать, что Дмитрий создавал и модернизировал конструкцию сам, за свой счет и это было очень непросто. Аппарат периодически капризничал, но все же конструкторские вопросы мы научились оперативно решать еще с «Рароком», а вот теорию продольной схемы приходилось осмыслять и строить по крупицам результатов. В общей сложности аппарат претерпел более 10 доработок и переделок. И вот, наконец, в ноябре 2020-го прошли ключевые испытания, продемонстрировавшие состоятельность продольной схемы. Serenity уверено летал, маневрировал, набирал высоту. Безусловно, это была победа! К сожалению, во втором полете, была допущена ошибка в пилотировании и аппарат разбился. Но, как сказал, сам конструктор: "Я все равно хотел его весь переделать".
Судьба аппарата «FlapFlyer» оказалась совсем иной. Изначально, предложенная Андреем концепция привода, оказалась несостоятельной. Опыт «Рарока» был здесь не применим, так как новизна предложенной концепции - очень высока. В погоне за уменьшением удельной массы конструкции были допущены значительные ошибки, которые привели к неработоспособности первой схемы. Проблемным оказался узел преобразования вращательного движения в возвратно поступательное. Для проверки гипотезы демпфирования необходимо было отказаться от явных мертвых точек, для этого в качестве преобразователя движения была выбрана кулиса. И это оказалось самой большой конструкторской проблемой. Второй не меньшей проблемой была общая компоновка аппарата. В качестве силовой установки использовался ДВС, это и привело к проблемам с «мягкой» передачей вращающего момента, которую так же следовало реализовать. От изначальной концепции в проекте остались только шасси, силовой каркас привода, трансмиссия и оперение, все остальное было последовательно переделано. На текущий момент аппарат готов к очередным испытаниям, которые ему и предстоят весной. «FlapFlyer» пока даже не пытался летать (было совершено несколько пробежек), поэтому нас еще наверняка ждут сюрпризы с аэродинамикой и динамикой, потому как и это несколько отличается от «Рарока». Главная проблема этого проекта – слишком большая новизна при минимальном количестве ресурсов. Только благодаря всем сочувствующим, друзьям и спонсорам, которые оказывают значительную помощь в реализации проекта, мы просто обречены на успех!
Теперь немного о вопросе «зачем все это нужно?». Зачем современному миру махолет? Ведь выглядит он ну как-то уж совсем вычурно и странно и, кажется, ни на что не способен. Ошибка и главное заблуждение состоит в том, что нужно рассматривать не выше указанные проекты, в качестве конечного продукта, а то что можно создать на их базе. Отработка и развитие машущекрылых аппаратов сможет значительно расширить возможности пилотируемой и беспилотной авиации. Безусловно сейчас более актуальны беспилотные конструкции, но развитие данного направление позволит разработать и пилотируемые! Ведь сама задача создания всех необходимых для полета сил, с помощью всего одного инструмента – крыла, не просто интересна, она таит много того, что позволит проектировать более совершенные летательные аппараты.
В связи с нашими успехами мы не можем не почтить память Киселева Валентина Афанасьевича, нашего учителя. Несмотря на то, что именно разногласия в подходах и взглядах, как нужно строить махолеты сделали нас оппонентами (даже были обвинения в воровстве идей Профессора), мы с большим уважением относимся к Валентину Афанасьевичу. Иной взгляд позволил оттолкнутся и уйти значительно вперед от идей его группы, что в конечном счете принесло успех!
С весны мы продолжим работу над нашими аппаратами. Будем рады любой поддержке.
Показать полностью
3
2
