
Роботы-щупальца!
Самих роботов, вероятно, вы уже видели (и не только в хентае), потому видео с ними много показывали ещё до научной публикации.
Свежеопубликованная научная работа вот, разбираем.
Если долго вглядываться в слона, можно увидеть хобот. Ещё такой же примерно фигнёй облеплен осьминог, папоротники и многие другие штуки.
Если эта штука разворачивается и постепенно сужается, то это не тентакль, а логарифмическая спираль. Поздравляю, кстати, теперь вы тоже своего рода математик.
Так вот. Возможно, учёные долго вглядывались в шедевры японской анимации и на третий день заметили, что при определенных движениях такие конечности прямо следуют поведению логарифмической спирали.
Дальше они решили зачем-то такие сделать. Не спрашивайте, зачем. Но надо было много и дёшево.
Раньше делали мало и дорого.
Попробовали воспроизводить гибкость и ловкость таких биологических конечностей, но с минимальными затратами на производство и управление. В смысле, чтобы подошло массовому потребителю. Тут, в отличие от других экономически-беспомощных работ, сначала разработали матмодель, а потом стали думать, как делать.
Сделали щупальцебота (назвали SpiRob) из 3 частей:
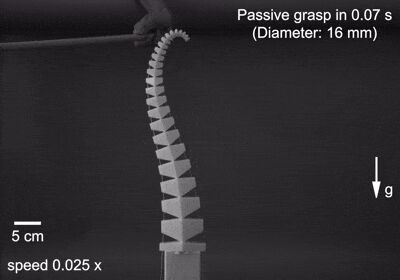
— Тело, оно же щупало или хватало — гнущаяся палка из уменьшающихся блоков, соединённых шарнирами типа позвоночиника. Щупальце и есть, только не из мяса, а скелетное. Внутри эластичный слой, чтобы щупало само разворачивалось, если не прикладывать усилие.
— Кабели — проходят через щупало от начала до конца и закреплены внизу и вверху. Когда натягивается только левый или правый кабель, робот скручивается влево или вправо в плотную спираль.
— Движки — натягивают и отпускают кабели.
Дальше их печатают из термопластичного полиуретана (TPU-95A).
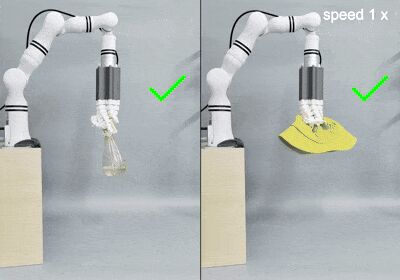
По большей части движения скопировались с осьминога, включая некоторую автономность щупальца. Как и с осьминогом, захват автоматический, то есть просто по факту прикосновения объект уже огибается и удерживается. Осьминог, если что, просто нажимает E на объекте, дальше щупальца сами как-то разбираются.
Контакт с объектом вычисляется аналитически по увеличению усилия на моторы. Так можно почувствовать даже пёрышко на практике. Если прошивка адекватная, робот нежен, как в первую брачную ночь. Ну, по крайней мере, один раз яйцо не разбил.
Что ещё показали:
1. Уменьшенный в 70 раз вариант длиной под сантиметр с диаметром кончика 0,14 мм. Сделан из смолы стереолитографической печатью. Использовался для безопасного захвата и манипуляций с муравьем без мема про полученную кашицу.
2. Трехкабельный однометровый — офигенно, уже можно использовать почти для всего практического, даже кидаться грязью, как слоны. На этой модели учёные впервые получили по щщам от своего робота.
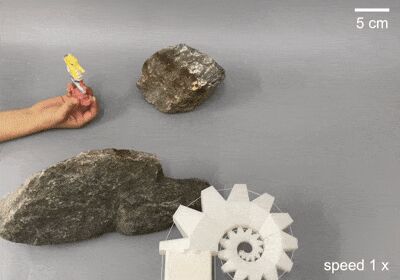
3. Массив щупалец: захват с помощью нескольких роботов, равномерно расположенных по окружности. Там не нужно кросс-датчики, щупальца не перепутываются и не требуют сложного управления, просто сами располагаются как надо.
Ну и всё это можно крепить на дроны. Пока не до конца понятно, зачем, но можно.
Грузоподъемность — до 260 раз больше собственной массы робота (10 кг для щупальца 38,4 г). Захват быстрый, до 60 мс. Ну и эта штука может ловить то, что в него метают или чем его пытаются ударить. Его там, собственно, били палкой и мячиком, он уже способен на самозащиту)
Это ещё один офигенный пример того, как формой можно кодировать способ взаимодействия с объектом — тут от большей части сложных датчиков, моторов и контроллеров избавились, правильно изготавливая спирали. Достаточно для практических применений.
Поэтому теперь просмотр мультиков тоже можно списывать в рабочее время и в расходы на RnD, что даёт налоговый вычет.
Вот другой отличный пример робота с распределённым манипулятором, который почему-то назвали роем нанороботов. Неграмотное быдло эти учёные. Робот там не программируется на взаимодействие, а следует своей физике, и получается правильный захват объектов.
А мы рекомендуем читать про осьминога тут на Пикабу, это один из лучших постов нашей уютной канавы. Потому что осьминог думает головой и щупальцами (и с ними надо договариваться ещё), какает через мозг и вообще сделан не так, как обычные земляне. Почти во всём.
Оригинал у нас в рядах Фурье. Там ещё другие упоротые штуки тоже. Вступайте в ряды Фурье!